

Abstract del progetto
Understanding and monitoring natural ecosystems is necessary for an efficient implementation of sustainable strategies to tackle climate and environmental-related challenges: protect and improve the quality of air, water, and soil; safeguard species biodiversity; and effectively manage natural resources. A long-standing challenge for the EU’s environmental policies is the low spatial and temporal resolution of available data for many regions. Existing sensor networks successfully provide a stream of data, but their cost
implies large average distances between base stations. Mobile sensor platforms that have been previously developed suffer from high complexity and insufficient robustness and are not widely available. The integration of electronic sensors, propulsion systems, position tracking and information transfer in robots for environmental sensing invariably leads to costly systems that require frequent servicing.
Advances in bioinspired robotics, material science, Artificial Intelligence (AI), and hyperspectral imaging, can together offer innovative and concrete solutions for a deeper analysis of natural processes and to intervene consequently with effective strategies.
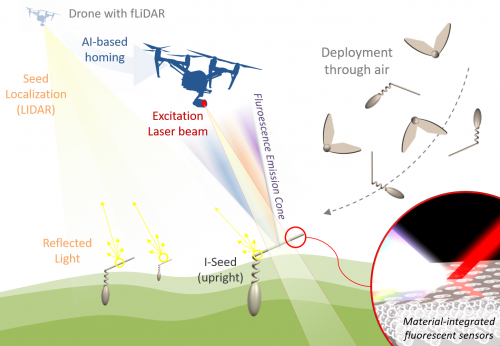

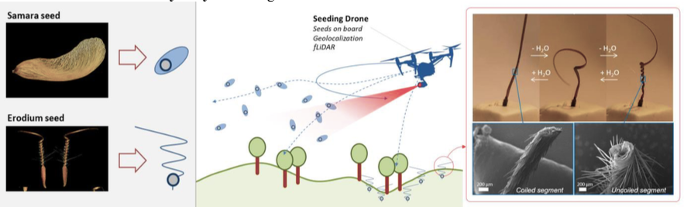

I-Seed targets toward the development of a radically simplified and environmentally friendly, approach for analysing and monitoring topsoil and air above soil environments and for extending environmental sensor frameworks for filling existing gaps of data analysis systems. Specifically, by looking at natural dispersion strategies of plant seeds, I-Seed aims at designing and deploying bioinspired soft miniaturized robots (“I-Seeds”) as a novel green-technology systems able to move by exploiting their morphological computation abilities, and to measure, in-situ, key parameters in the topsoil (i.e., humidity “RH”, temperature “T”, carbon dioxide “CO2”, mercury ions “Hg2+”) and in the air above the top soil (RH, T, CO2). I-Seeds sensing is based on a chemical transduction mechanism and fluorescence-based optical readout, with a low cost and a decreased level of design complexity because of the integrated functionalities in the materials that build their architecture. The robots are made of environmentally benign components and use a bio-inspired dispersion mechanism for an easy self-deployment and for covering large areas.
1) Scientific objectives: a focused biological investigation on the morphological and structural features of natural plant seeds (i.e., Erodium cicutarium and samara seeds) relevant for the design of the robots, including: shape adaptation, material properties, biomechanics, flying/self-burying capabilities, models of the mechanics of motion in flight and on ground, and relationships with changing environmental conditions.
2) Technological objectives: (i) to translate biological principles for designing and developing novel environmentally responsible seed-like soft robots made of multi-functional biodegradable materials; (ii) to advance in-situ sensing technology based on chemical transduction mechanisms; (iii) to develop new models for the motion of soft robotic systems; (iv) to advance remote sensing principles of integrated LiDAR (fluorescence and conventional), photogrammetry and georeferencing techniques; (v) to foster the spatial coverage of existing environmental monitoring networks with low-cost monitoring systems; (vi) to propose solutions for energy saving inspired from plant seed movements; (vii) to demonstrate the process between data gathering and knowledge generation for supporting decision-makers assessments.
3) Environmental sustainability and community building: (i) to fill the current gaps in geographical coverage of existing monitoring networks in areas where no monitoring data are available (i.e., Russia, Southeast Asia, South America, Africa), that would help to support the achievement of several policy agendas including, but not limited to, the 2030 UN Agenda on Sustainable Development, the Minamata Convention on mercury pollution and the Paris Agreement on Climate Change; (ii) to leverage the cross-disciplinary connection of the community of biorobotics and environmental science toward the vision of an environmentally-responsible design of new technologies (no “e-waste”), and to promote the use of bioinspired robots in environmental monitoring to support the evaluation of the effectiveness of measures undertaken in the implementation of environmental policies; (iii) to promote eco-innovation initiatives through citizens involvement for raising awareness on critical environmental issues by demonstrating the use of a low-cost and robust bioinspired technologies that would allow to improve the surveillance of natural ecosystems and human health.
LEIBNIZ-INSTITUT FUER NEUE MATERIALIEN GEMEINNUETZIGE GMBH (INM), Germany
WAGENINGEN UNIVERSITY (WU), Netherlands
SCUOLA SUPERIORE DI STUDI UNIVERSITARI E DI PERFEZIONAMENTO S ANNA (SSSA), Italy
OLYSEUS INNOVATIONS LIMITED (OLYSEUS INNOV), Cyprus
Paolo Mazzetti
Francesco De Simone
Gianluca Bevacqua
Prasad Shelke
Sergio Cinnirella
Francesco D'Amore
Francesco Carbone
Francesca Sprovieri
Attilio Naccarato
Giovanni D'Urso
Ian Hedgecock
Mariantonia Bencardino
Charikleia Gournia